Sensor list
Using the Sensor List
The Sensor List is a feature that allows users to quickly check or verify all deployed sensor models and selectively enable Sensor Capture Mode.
For a primer on using the Sensor Capture Mode. please refer to the following link: Sensor Capture
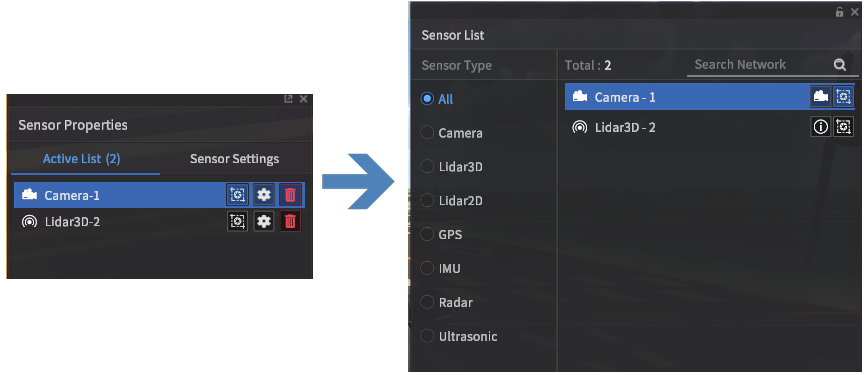
As shown in the example below, when a camera model and 3D lidar model are instantiated from the Sensors menu, they are added to the Sensor List where they can be filtered by type, as shown in the figure on the right. WIthin the Sensor List menu, users may then enable Capture Mode.
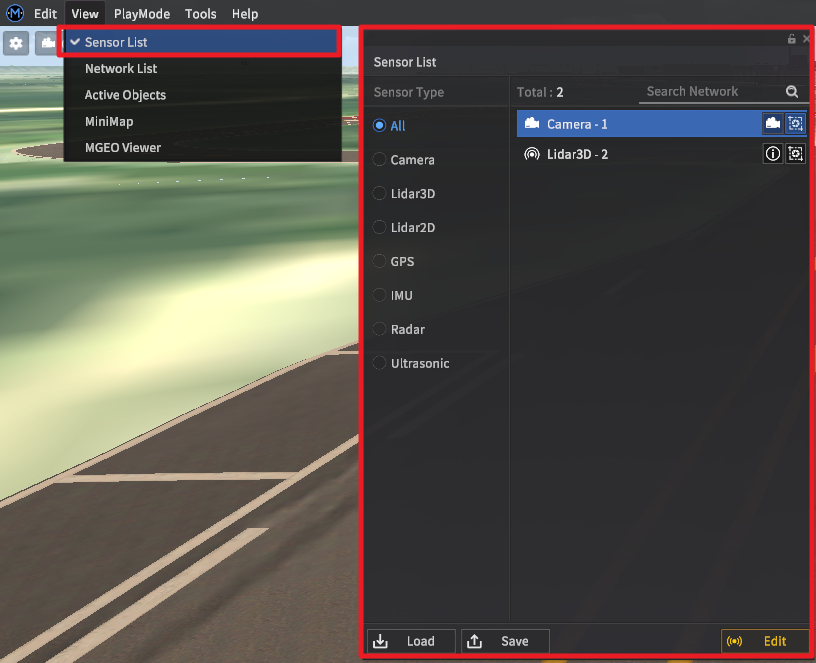
Access the Sensor List from the main menu bar. Go to View >> Sensor List.
Sensor List Details
The Sensor List can be filtered according to the types of sensors supported by MORAI SIM.
The categories are All, Camera, Lidar3D, Lidar2D, GPS, IMU, Radar, and Ultrasonic.
Capture Mode
The Capture Mode button (highlighted in red in the screenshot below) located next to each sensor model entry in the Sensor List designates a sensor to be run in Capture Mode.
In Capture Mode, the sensor is disabled and only activates when the user then also activates Sensor Capture Mode. This allows the sensor to then record every type of sensor data simultaneously (i.e., a camera model will save the RGB output, semantically segmented output, and bounding box data at once).
A sensor that does not have Capture Mode enabled will only save the data output it has already been set to when Sensor Capture Mode is activated.
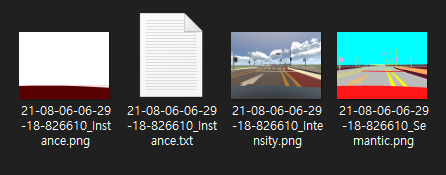
Camera: Camera sensor models have four different sensor output formats.
Intensity: RGB output
Semantic: Semantic segmentation output
Instance: Instance segmentation output
Instance(txt): The list of all objects within the FOV

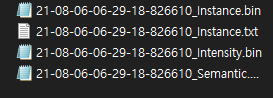
3D Lidar: Lidar sensor models also have four different point cloud output formats.
Intensity: Intensity modeled on color and surface reflectivity.
Semantic: Semantically segmented point cloud data
Instance: Point cloud data segmented by object instances
Instance(txt): The list of all objects captured by the lidar sensor
Other Sensors: All other sensors do not have different output data types and as a result, they operate exactly the same regardless of the Capture Mode.
