Sensor noise settings
Overview
By default, the sensor models offered by MORAI SIM are idealized models. Real-world sensor data is full of noise, bias, and errors introduced by external sources (weather, loss of signal) or user error. To accommodate for these factors, MORAI SIM provides noise models that add sources of signal noise to a variety of sensor models.
Sensor noise model options can be found under the settings panel of each sensor model. As of version 22.R1.0, noise models are available for GPS, Lidar, and IMU models.
GPS Noise
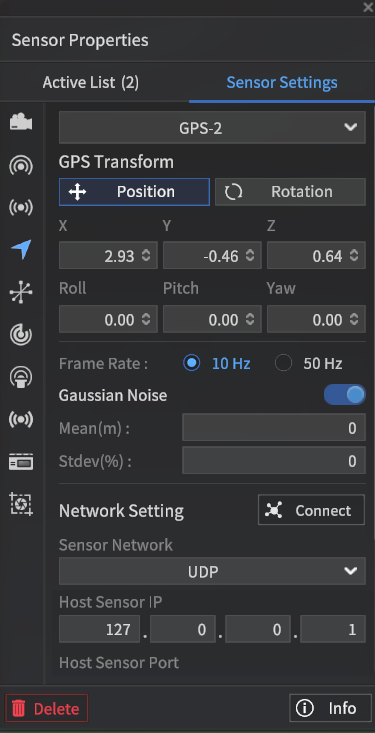
GPS sensor models have a Gaussian noise option that can be toggled. Users can set the desired mean noise offset and standard deviation values.
Lidar Noise
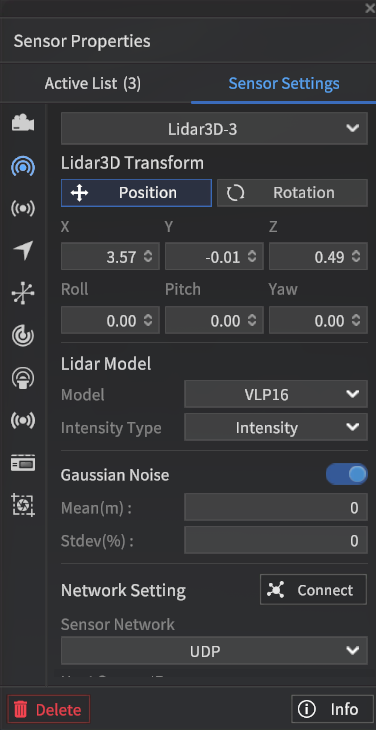
Both 3D and 2D lidar sensor models have a Gaussian noise setting. Users can set the desired mean noise offset and standard deviation values.
IMU Noise Filter
IMU models have a number of sensor noise models to choose from:
Bias-instability
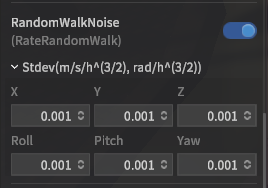
Random Walk (Rate random walk)
White Noise (Velocity/angle random walk)
All noise sources can be applied to a combination of acceleration and rotation axes. Note that the units for each type of model are different (i.e. m/s2 for translational bias-instability).
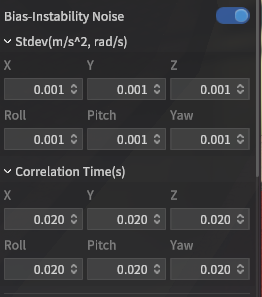
Bias-instability standard deviation (sigma)
Acceleration: m/s2
Gyroscope: rad/s
Correlation Time: s
Random walk standard deviation (sigma)
Acceleration: m/s/h3/2
Gyroscope: rad/h3/2
White noise (Velocity/angle random walk) standard deviation (sigma)
Acceleration: m/s/√h
Gyroscope: rad/√h