UDP Network Settings
Setting Up a UDP Connection
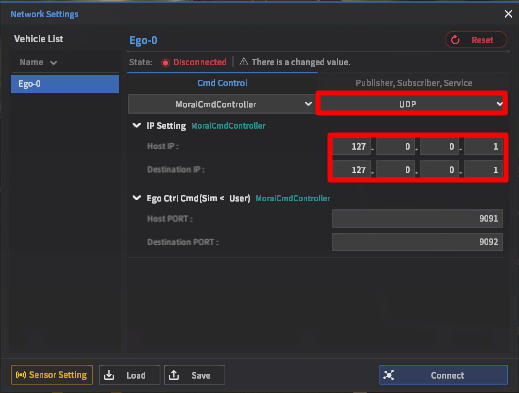
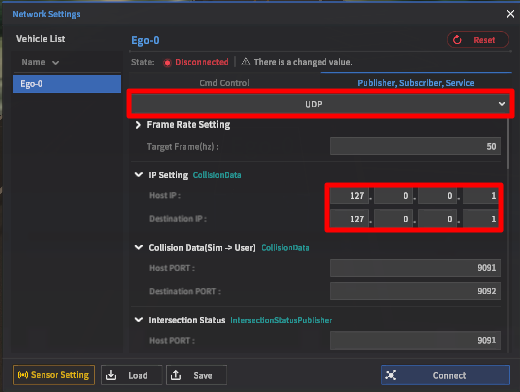
From the Network Settings window, select UDP from the drop-down menu for both Cmd Control and Publisher/Subscriber/Service tabs, then configure IP addresses.
The simulation PC/machine is the Host.
Any other machine connected to the Host is the Destination (typically this is the machine running the AD algorithm or software stack).
For a single machine setup, use the 127.0.0.1 IP address for all IP fields.
Make sure that none of the port numbers overlap to prevent communication issues
Interface Details and Protocol Structure
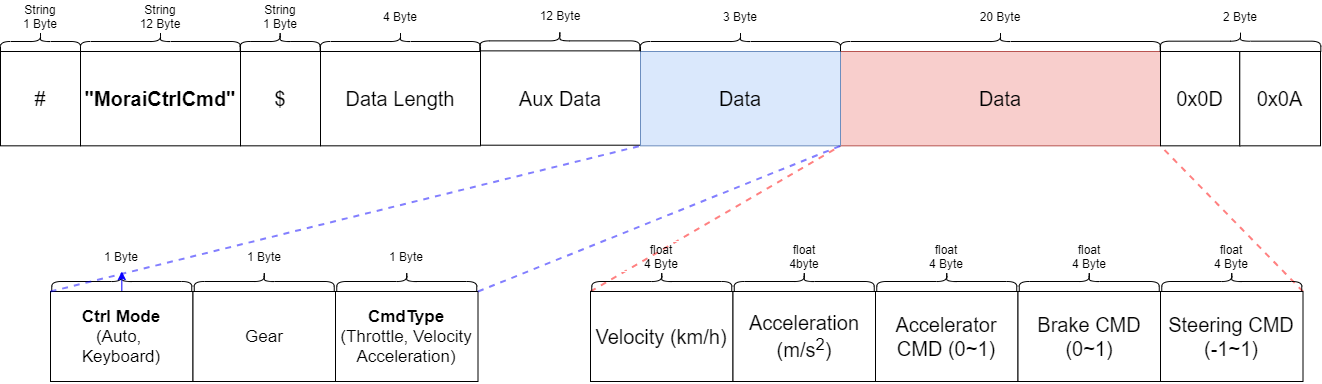
Details of each UDP message and its contents are listed in this section. All messages are preceded by a header region with a message identifier string and end with a common 2 byte tail.
Ego Ctrl Cmd
Ego Ctrl Cmd sends command messages to the ego-vehicle.
Protocol details
Total packet size: 55 Bytes
Data field size: 3 + 20 Bytes
No | Name | Size | Type | Unit | Remarks |
|---|---|---|---|---|---|
1 | CtrlMode | 1 | uint8 | - | 1: Keyboard, 2: Auto Mode |
2 | Gear | 1 | uint8 | - | 0: Manual, 1: Parking, 2: Reverse, 3: Neutral, 4: Drive, 5: Lower gear |
3 | CmdType | 1 | uint8 | - | Determines the control type. |
4 | Velocity | 4 | float | km/h | (Only active if CmdType == 2) |
5 | Acceleration | 4 | float | m/s2 | (Only active if CmdType == 3) |
6 | Accelerator CMD | 4 | float | - | Accelerator pedal input ranges from 0 to 1 |
7 | Brake CMD | 4 | float | - | Brake pedal input ranges from 0 to 1 |
8 | Steering CMD | 4 | float | - | -1~1: Steering control command (Steer = actual steering angle value/maximum steering angle) |
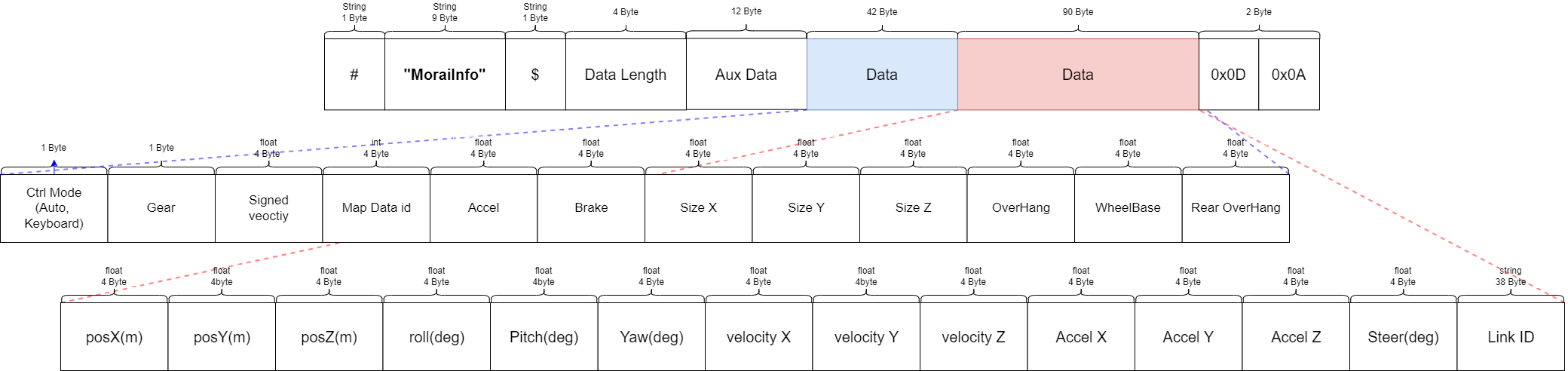
Ego Vehicle Status
Ego Vehicle Status returns the current state values of the ego-vehicle.
Protocol details
Total packet size: 121 Bytes
Data field size: 42 + 52 Bytes
No | Name | Size | Type | Unit | Remarks |
|---|---|---|---|---|---|
1 | CtrlMode | 1 | int8 | - | 1: Keyboard, 2: Auto Mode |
2 | Gear | 1 | int8 | - | 0: Manual, 1: Parking, 2: Reverse, 3: Neutral, 4: Drive, 5: Lower gear |
3 | Signed Velocity | 4 | float | km/h | Current vehicle velocity |
4 | Map Data ID | 4 | int | - | 0 ~ 9999: Digital Twin Map ID |
5 | Accel | 4 | float | - | Accelerator pedal input ranges from 0 to 1 |
6 | Brake | 4 | float | - | Brake pedal input ranges from 0 to 1 |
7 | sizeX | 4 | float | m | Ego-vehicle size (x-axis) |
8 | sizeY | 4 | float | m | Ego-vehicle size (y-axis) |
9 | sizeZ | 4 | float | m | Ego-vehicle size (z-axis) |
10 | Overhang | 4 | float | Ego-vehicle front overhang length specification | |
11 | Wheelbase | 4 | float | Ego-vehicle wheelbase length specification | |
12 | Rear Overhang | 4 | float | Ego-vehicle rear overhang length specification | |
13 | posX | 4 | float | m | X-axis value of the ego-vehicle’s current position |
14 | posY | 4 | float | m | Y-axis value of the ego-vehicle’s current position |
15 | posZ | 4 | float | m | Z-axis value of the ego-vehicle’s current position (elevation) |
16 | Roll | 4 | float | deg | Current roll angle value |
17 | Pitch | 4 | float | deg | Current pitch angle value |
18 | Heading | 4 | float | deg | Current heading angle value |
19 | VelocityX | 4 | float | km/h | Current vehicle velocity (x-axis component) |
20 | VelocityY | 4 | float | km/h | Current vehicle velocity (y-axis component) |
21 | VelocityZ | 4 | float | km/h | Current vehicle velocity (z-axis component) |
22 | AccelX | 4 | float | m/s2 | Current vehicle acceleration (x-axis component) |
23 | AccelY | 4 | float | m/s2 | Current vehicle acceleration (y-axis component) |
24 | AccelZ | 4 | float | m/s2 | Current vehicle acceleration (z-axis component) |
25 | Steer | 4 | float | deg | Current steering angle |
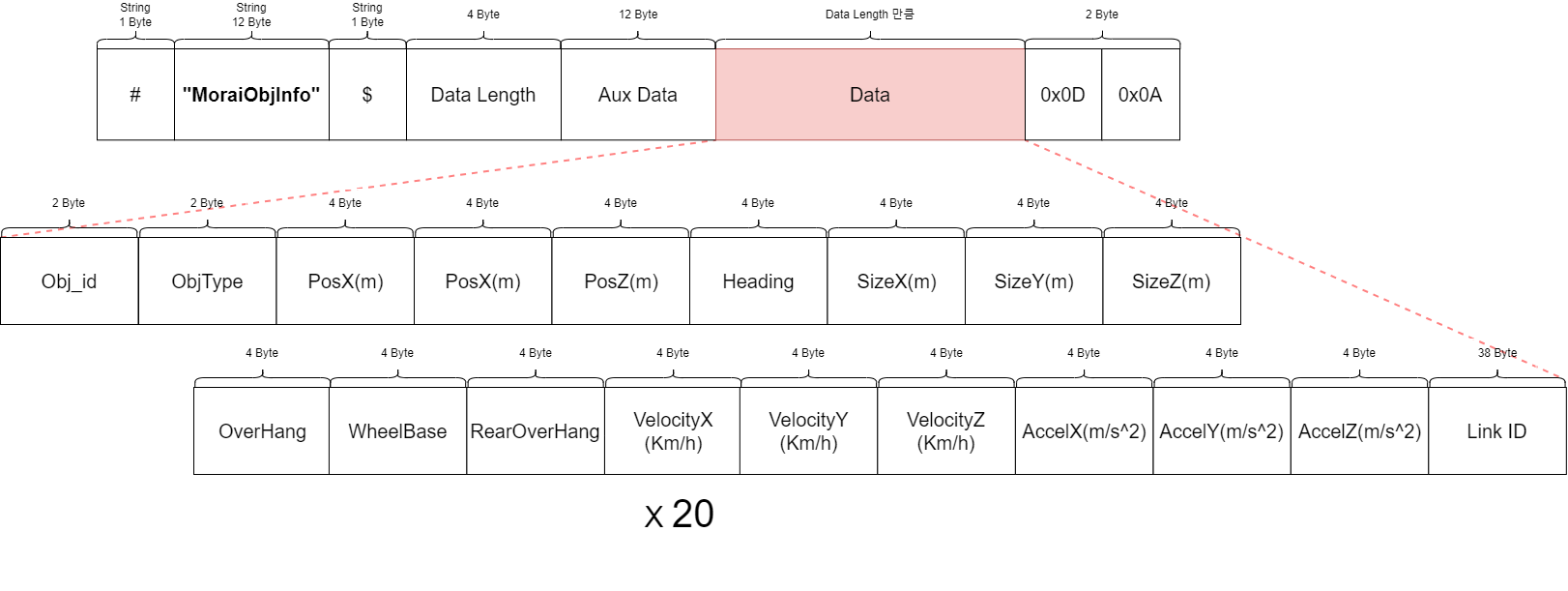
Object Info
Object Info contains information about each object placed in the scene.
Protocol details
Total packet size: 1472 bytes
Data field size: 1420 bytes (68 bytes × 20)
The simulator reports object info data for the 20 closest objects to the current vehicle.
No | Name | Size | Type | Unit | Remarks |
|---|---|---|---|---|---|
1 | Obj_id | 2 | short | - | Unique identifier number of the generated object |
2 | ObjType | 2 | short | - | 0: Pedestrian, 1: Dynamic actor (NPC vehicles), 2: Static object, -1: Ego-vehicle |
3 | posX | 4 | float | m | X-axis value of the current position |
4 | posY | 4 | float | m | Y-axis value of the current position |
5 | posZ | 4 | float | m | Z-axis value of the current position (elevation) |
6 | Heading | 4 | float | deg | Heading angle of the object |
7 | sizeX | 4 | float | m | Width of the object |
8 | sizeY | 4 | float | m | Length of the object |
9 | sizeZ | 4 | float | m | Height of the object |
10 | Overhang | 4 | float | Object front overhang length specification | |
11 | Wheelbase | 4 | float | Object wheelbase length specification | |
12 | Rear Overhang | 4 | float | Object rear overhang length specification | |
13 | VelocityX | 4 | float | km/h | Current object velocity (x-axis component) |
14 | VelocityY | 4 | float | km/h | Current object velocity (y-axis component) |
15 | VelocityZ | 4 | float | km/h | Current object velocity (z-axis component) |
16 | AccelX | 4 | float | m/s2 | Current object acceleration (x-axis component) |
17 | AccelY | 4 | float | m/s2 | Current object acceleration (y-axis component) |
18 | AccelZ | 4 | float | m/s2 | Current object acceleration (z-axis component) |
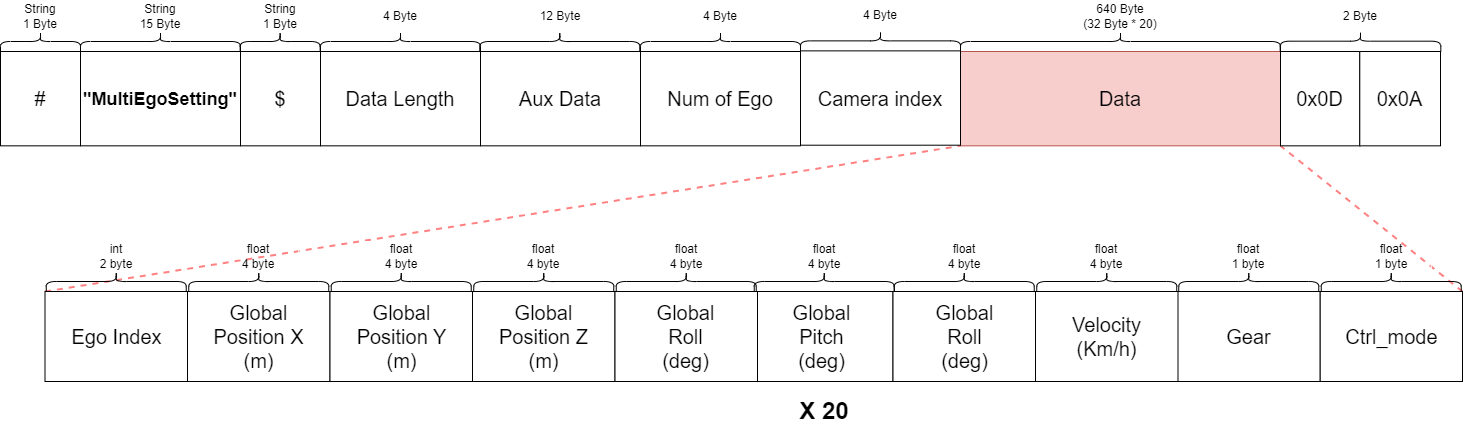
Multi Ego Setting
Multi Ego Setting enables the simulator to set multiple egovehicles in the same scene, outputting all egovehicle-related variables for each unique ego-vehicle.
Protocol details
Total packet size: 683 bytes
Data field size: 648 bytes (4 + 4 + 32 bytes × 20)
No | Name | Size | Type | Unit | Remarks |
|---|---|---|---|---|---|
1 | num_of_ego | 4 | int32 | - | Total number of egovehicles in the scene |
2 | camera_index | 2 | short | - | The ID of the vehicle the camera is currently centered on |
3 | ego_index | 2 | short | - | ID of the egovehicle |
4 | posX | 4 | float | m | X-axis value of the current position |
5 | posY | 4 | float | m | Y-axis value of the current position |
6 | posZ | 4 | float | m | Z-axis value of the current position (elevation) |
7 | Roll | 4 | float | deg | Current roll angle value |
8 | Pitch | 4 | float | deg | Current pitch angle value |
9 | Heading | 4 | float | deg | Current heading angle value |
10 | Velocity | 4 | float | km/h | Current vehicle speed |
11 | Gear | 1 | int8 | - | 1: Parking, 2: Reverse, 3: Neutral, 4: Drive |
12 | CtrlMode | 1 | int8 | - | 1: keyboard mode, 16: automode |
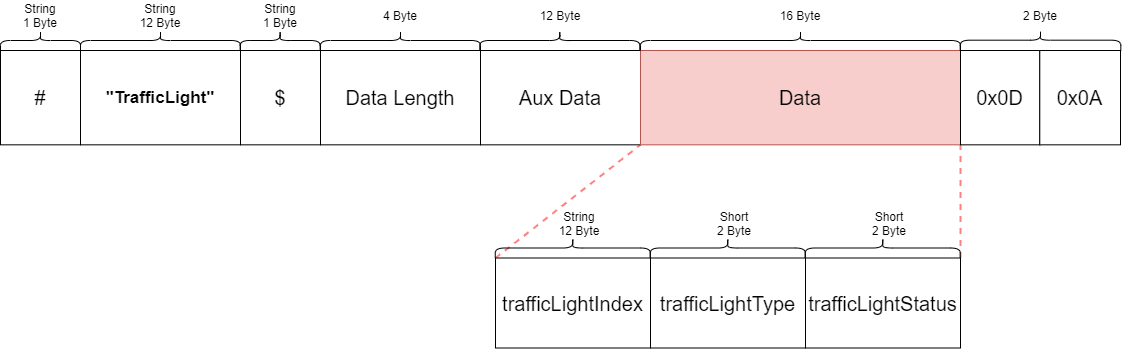
Get TrafficLight Status
Get TrafficLight Status reports the current state of the most relevant traffic light.
Protocol details
Total packet size: 48 bytes
Data field size: 16 bytes
No | Name | Size | Type | Unit | Remarks |
|---|---|---|---|---|---|
1 | traffic light index | 12 | string | - | Unique identifier string for each traffic light |
2 | traffic light type | 2 | short | - | Defines the traffic light type and configuration 0: Red/Yellow/Green |
3 | traffic light status | 2 | short | - | Defines which light is currently lit 1: Red Combined lights (multiple lights on simultaneously) can be applied using standard bitwise operations |
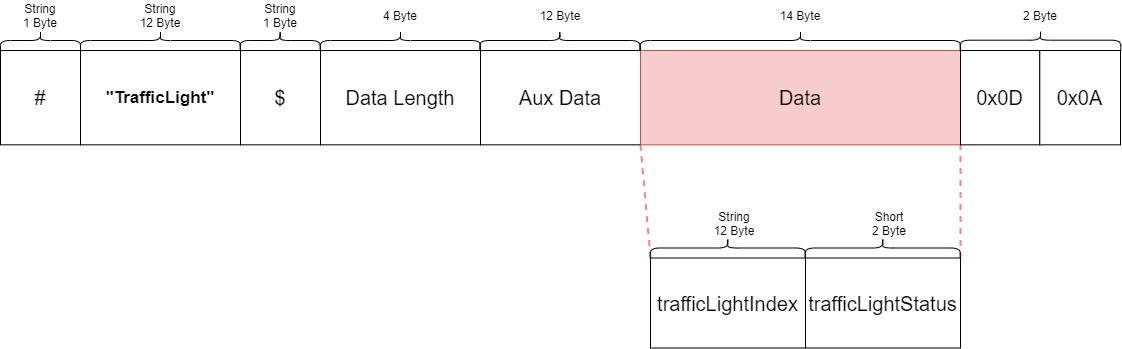
Set TrafficLight Ctrl
Set TrafficLight Ctrl transmits traffic light control commands.
Protocol details
Total packet size: 46 bytes
Data field size: 14 bytes
No | Name | Size | Type | Unit | Remarks |
|---|---|---|---|---|---|
1 | traffic light index | 12 | string | - | Unique identifier string for each traffic light |
2 | traffic light status | 2 | short | - | Defines which light is currently lit 1: Red Combined lights (multiple lights on simultaneously) can be applied using standard bitwise operations |
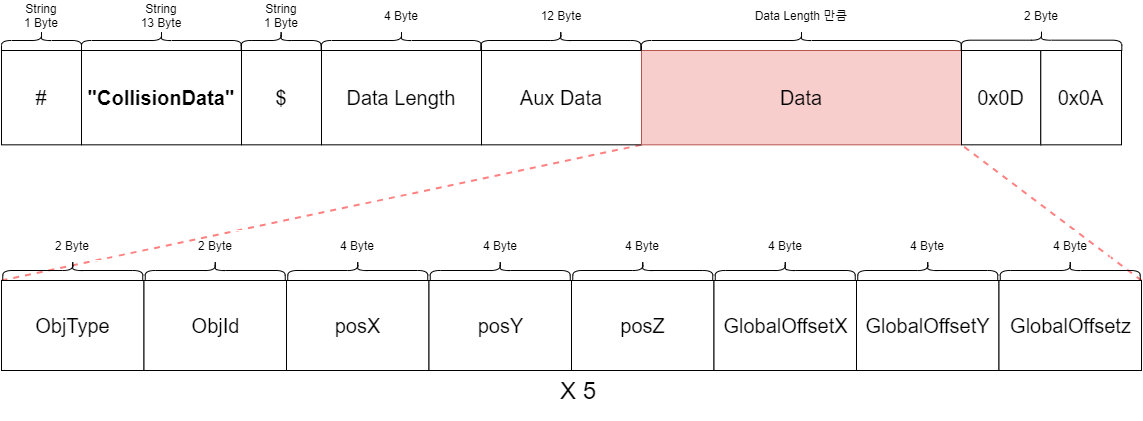
Collision Data
Collision Data reports any collisions involving the ego-vehicle.
Protocol details
Total packet size: 173 bytes
Data field size: 140 bytes (28 × 5 bytes)
No | Name | Size | Type | Unit | Remarks |
|---|---|---|---|---|---|
1 | ObjType | 2 | short | - | Object type code 0: Pedestrian, 1: NPC Vehicle, 2: Static object, -1: Ego-vehicle |
2 | ObjId | 2 | short | - | Unique identifier number of the collided object |
3 | posX | 4 | float | m | The x-axis position of the collided object w.r.t the ego-vehicle |
4 | posY | 4 | float | m | The y-axis position of the collided object w.r.t the ego-vehicle |
5 | posZ | 4 | float | m | The z-axis position of the collided object w.r.t the ego-vehicle |
6 | global offset x | 4 | float | m | The x-axis position of the collided object w.r.t the map coordinate system |
7 | global offset y | 4 | float | m | The y-axis position of the collided object w.r.t the map coordinate system |
8 | global offset z | 4 | float | m | The z-axis position of the collided object w.r.t the map coordinate system |
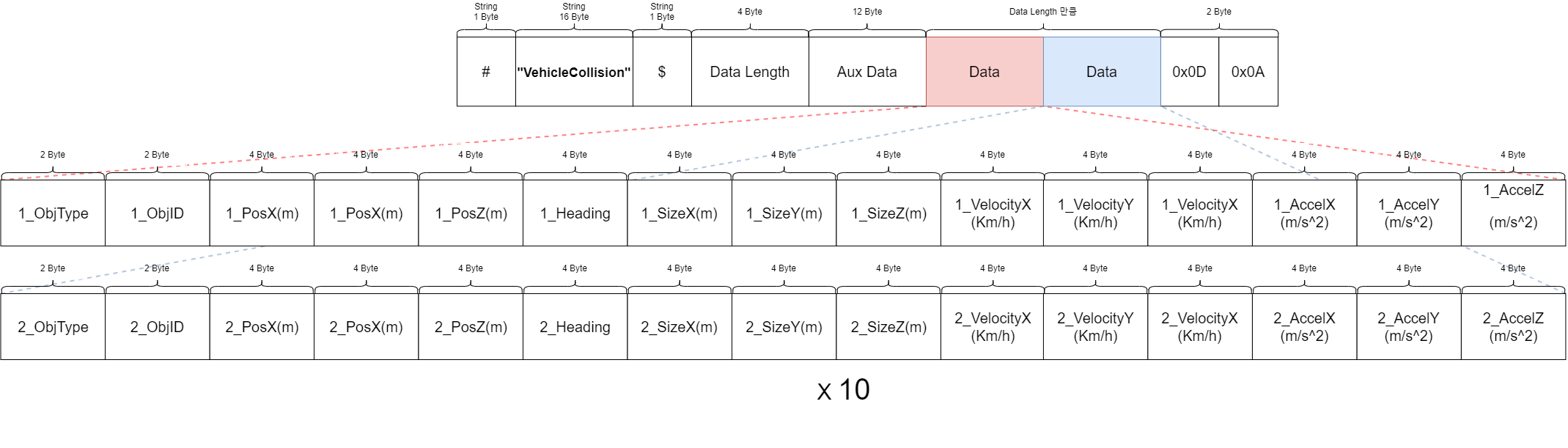
NPC Vehicle Collision Data
NPC Vehicle Collision Data reports any collisions involving NPC vehicles. As NPC vehicles are classified as objects, this message is divided into two identical smaller messages - each corresponding to a NPC vehicle.
Protocol details
Total packet size: 1156 bytes
Data field size: 1120 bytes (112 × 10 bytes)
No | Name | Size | Type | Unit | Remarks |
|---|---|---|---|---|---|
1 | ObjType | 2 | short | - | Object type code 0: Pedestrian, 1: NPC Vehicle, 2: Static object, -1: Ego-vehicle |
2 | ObjId | 2 | short | - | Unique identifier number of the collided object |
3 | posX | 4 | float | m | X-axis value of the current position |
4 | posY | 4 | float | m | Y-axis value of the current position |
5 | posZ | 4 | float | m | Z-axis value of the current position (elevation) |
6 | Heading | 4 | float | deg | Heading angle of the object |
7 | sizeX | 4 | float | m | Width of the object |
8 | sizeY | 4 | float | m | Length of the object |
9 | sizeZ | 4 | float | m | Height of the object |
10 | VelocityX | 4 | float | km/h | Current object velocity (x-axis component) |
11 | VelocityY | 4 | float | km/h | Current object velocity (y-axis component) |
12 | VelocityZ | 4 | float | km/h | Current object velocity (z-axis component) |
13 | AccelX | 4 | float | m/s2 | Current object acceleration (x-axis component) |
14 | AccelY | 4 | float | m/s2 | Current object acceleration (y-axis component) |
15 | AccelZ | 4 | float | m/s2 | Current object acceleration (z-axis component) |
↓ Second Object Data | |||||
16 | ObjType | 2 | short | - | Object type code 0: Pedestrian, 1: NPC Vehicle, 2: Static object, -1: Ego-vehicle |
17 | ObjId | 2 | short | - | Unique identifier number of the collided object |
18 | posX | 4 | float | m | X-axis value of the current position |
19 | posY | 4 | float | m | Y-axis value of the current position |
20 | posZ | 4 | float | m | Z-axis value of the current position (elevation) |
21 | Heading | 4 | float | deg | Heading angle of the object |
22 | sizeX | 4 | float | m | Width of the object |
23 | sizeY | 4 | float | m | Length of the object |
24 | sizeZ | 4 | float | m | Height of the object |
25 | VelocityX | 4 | float | km/h | Current object velocity (x-axis component) |
26 | VelocityY | 4 | float | km/h | Current object velocity (y-axis component) |
27 | VelocityZ | 4 | float | km/h | Current object velocity (z-axis component) |
28 | AccelX | 4 | float | m/s2 | Current object acceleration (x-axis component) |
29 | AccelY | 4 | float | m/s2 | Current object acceleration (y-axis component) |
30 | AccelZ | 4 | float | m/s2 | Current object acceleration (z-axis component) |
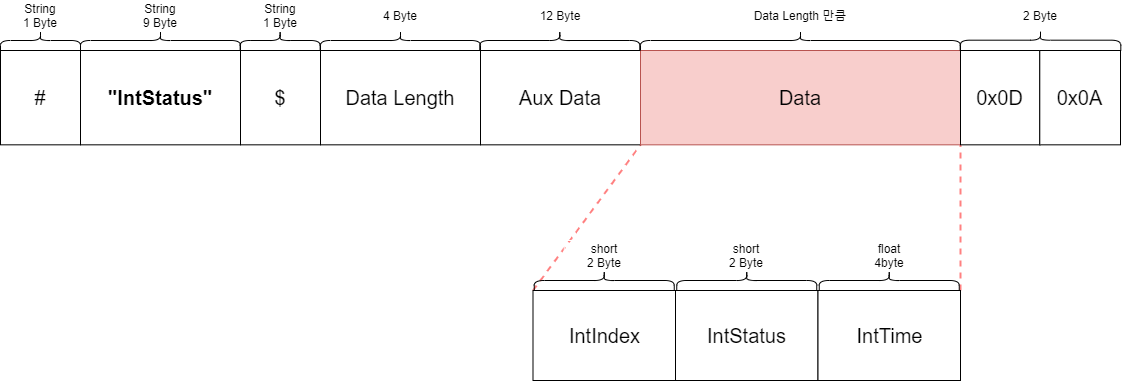
Get Intersection Status
Get Intersection Status returns the current state of the most relevant intersection.
Protocol details
Total packet size: 37 bytes
Data field size: 8 bytes
No | Name | Size | Type | Unit | Remarks |
|---|---|---|---|---|---|
1 | intersection index | 2 | short | - | Unique identifier number for each intersection |
2 | intersection status | 2 | short | - | Current intersection status |
3 | intersection status time | 4 | float | The amount of time the intersection has maintained the current state |
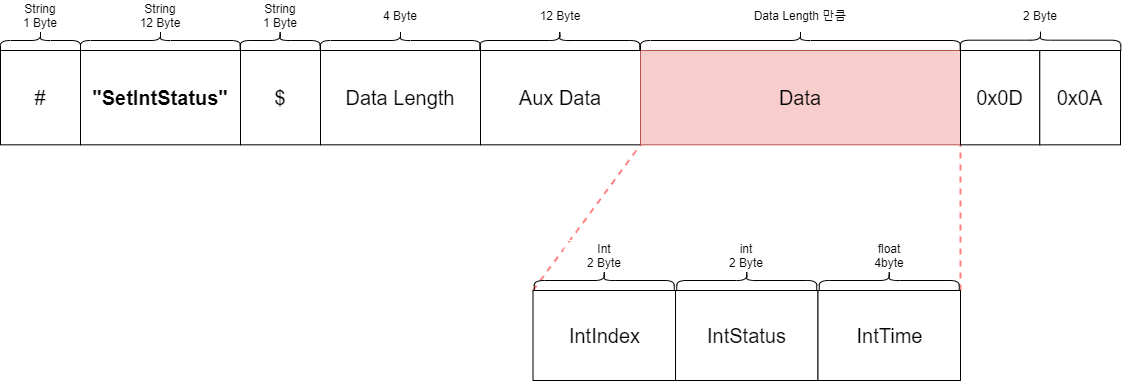
Set Intersection Status
Set Intersection Status changes the current state of an intersection according to user input.
Protocol details
Total packet size: 40 bytes
Data field size: 8 bytes
No | Name | Size | Type | Unit | Remarks |
|---|---|---|---|---|---|
1 | intersection index | 2 | short | - | Unique identifier number for each intersection |
2 | intersection status | 2 | short | - | Current intersection status |
3 | intersection status time | 4 | float | The amount of time the intersection has maintained the current state |
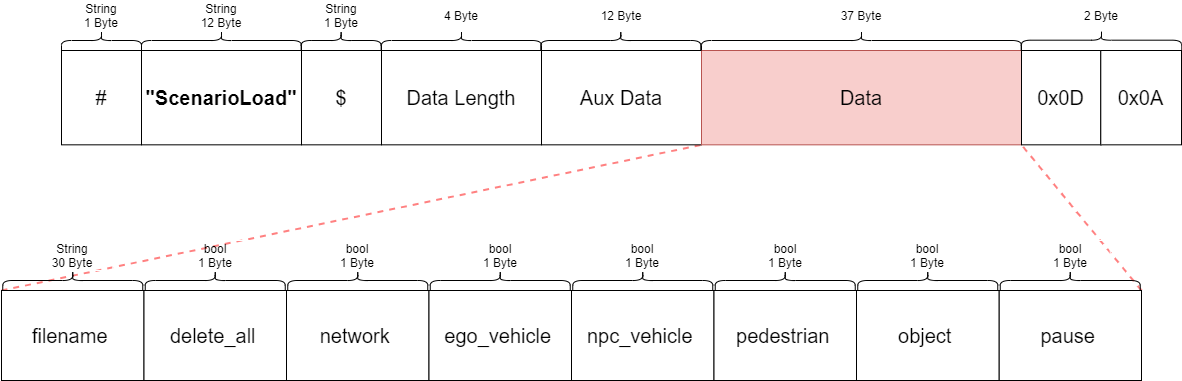
Scenario Load
Scenario Load instructs the simulator to load specific pre-built
.jsonscenario filesProtocol details
Total packet size: 69 bytes
Data field size: 37 bytes
No | Name | Size | Type | Unit | Remarks |
|---|---|---|---|---|---|
1 | file name | 30 | string | - | |
2 | delete all | 1 | bool | - | |
3 | load network connection data | 1 | bool | - | |
4 | load ego vehicle data | 1 | bool | - | |
5 | load npc vehicle data | 1 | bool | - | |
6 | load pedestrian data | 1 | bool | - | |
7 | load object data | 1 | bool | - | |
8 | set pause | 1 | bool | - |
Save Sensor Data
Save Sensor Data saves sensor data for the current simulation frame.
Protocol details
Total packet size: 125 bytes
Data field size: 91 bytes
No | Name | Size | Type | Unit | Remarks |
|---|---|---|---|---|---|
1 | is custom file name | 1 | bool | - | Determines if the save file name is custom input by the user |
2 | custom file name | 30 | string | - | The custom save file name input by the user |
3 | file dir | 60 | string | - | The full path string of the save file |
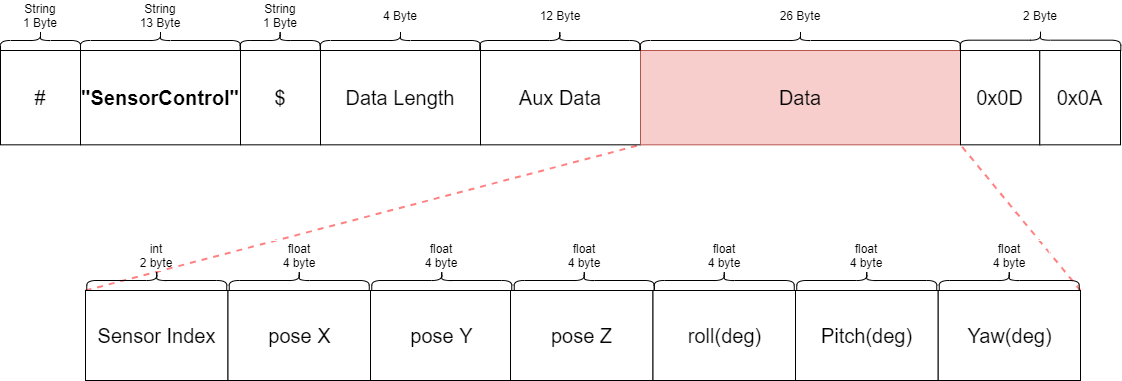
Sensor Control
Sensor Control controls the position and orientation of a designated sensor according to input commands.
Protocol details
Total packet size: 59 bytes
Data field size: 26 bytes
No | Name | Size | Type | Unit | Remarks |
|---|---|---|---|---|---|
1 | sensor index | 2 | short | - | |
2 | pose | 4 | float | m | |
3 | posY | 4 | float | m | |
4 | posZ | 4 | float | m | |
5 | roll | 4 | float | deg | |
6 | pitch | 4 | float | deg | |
7 | heading | 4 | float | deg |
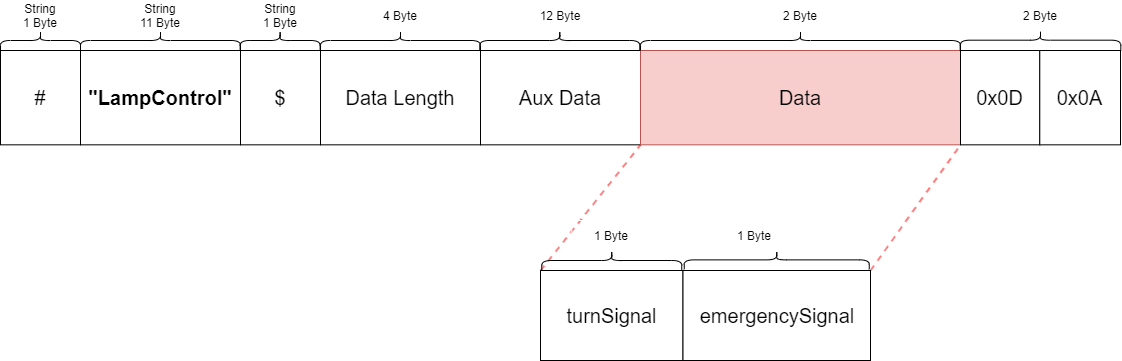
Turn Signal Lamp Control
Turn Signal Lamp Control controls the turn signal lamp lights of the vehicle.
Protocol details
Total packet size: 33 bytes
Data field size: 2 bytes
No | Name | Size | Type | Unit | Remarks |
|---|---|---|---|---|---|
1 | turn signal | 1 | byte | - | 0: No signal, 1: Left turn signal, 2: Right turn signal |
2 | emergency signal | 1 | byte | - | 0: No signal, 1: Emergency lamps on |